


University of Florida / Kookmin University ©


Simultaneous Localization and Mapping (SLAM)
SLAM was not used by UF during the DARPA Grand and Urban Challenges. Rather, maps were built using GPS and IMU data to register all objects in a global coordinate system. The problem with this is that the GPS error is not known at the map creation time. When driving through the map, a different GPS error would exist so things ‘might not quite line up’. Added onto this was that multi-
Today, the UF vehicle uses a SLAM approach to localize itself in its environment. Figure 1 shows a test area in Gainesville, Florida. A point cloud map, shown in Figure 2, was generated using a SLAM technique based on lidar data collected by driving through the area. None of the data points are registered to an absolute global coordinate system. In other words, GPS was not used to determine an absolute latitude and longitude for the vehicle position as it collected the data. Rather, an origin was established based on where the first data was collected.
Fig 1: Test Area, Gainesville, Florida
Fig 2: Point Cloud Map of Test Area
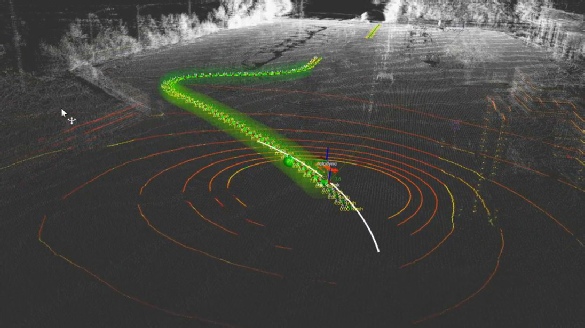
Figure 3 shows a route (green color) that has been planned through the test area. The a priori map data points are shown in white. The instantaneously collected lidar data is shown in red and yellow. The position and orientation of the vehicle has been successfully determined based on matching the instantaneous points to the points in the map. No GPS was used in this example, but GPS could be used to provide a seed location from which to start the point matching process.
Fig 3: Navigation Path ; a priori point cloud (white) ; current sensor data (red, yellow) ; path (green)
The SLAM approach has been successfully implemented on the UF Urban Challenge vehicle. Data has been collected at New Smyrna Speedway (Figure 4) so that it may be tested and further developed for higher speeds. Different point matching algorithms must be investigated to determine what technique will work well in the high-
Fig. 4: Point Cloud Data from New Smyrna Speedway


| overall_approach |
| slam |